Lunar Rover Wheel - Colorado School of Mines Manufacturing Innovation Competition
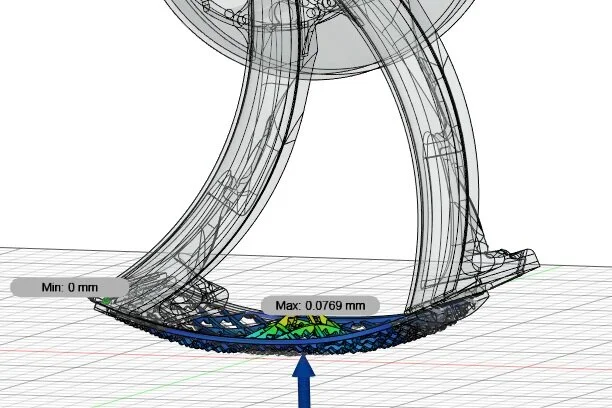
THE REQUIREMENTS
Featured

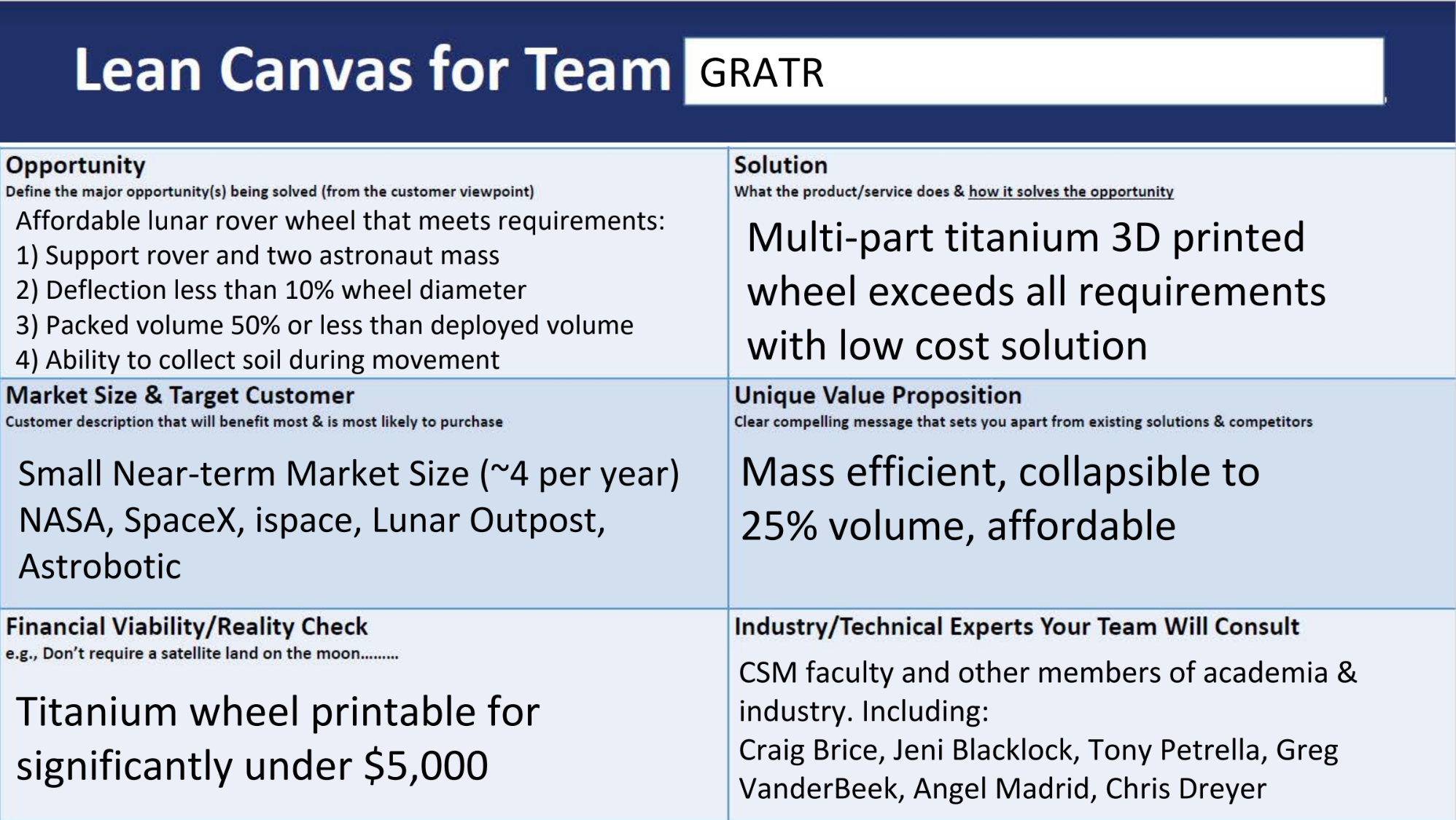
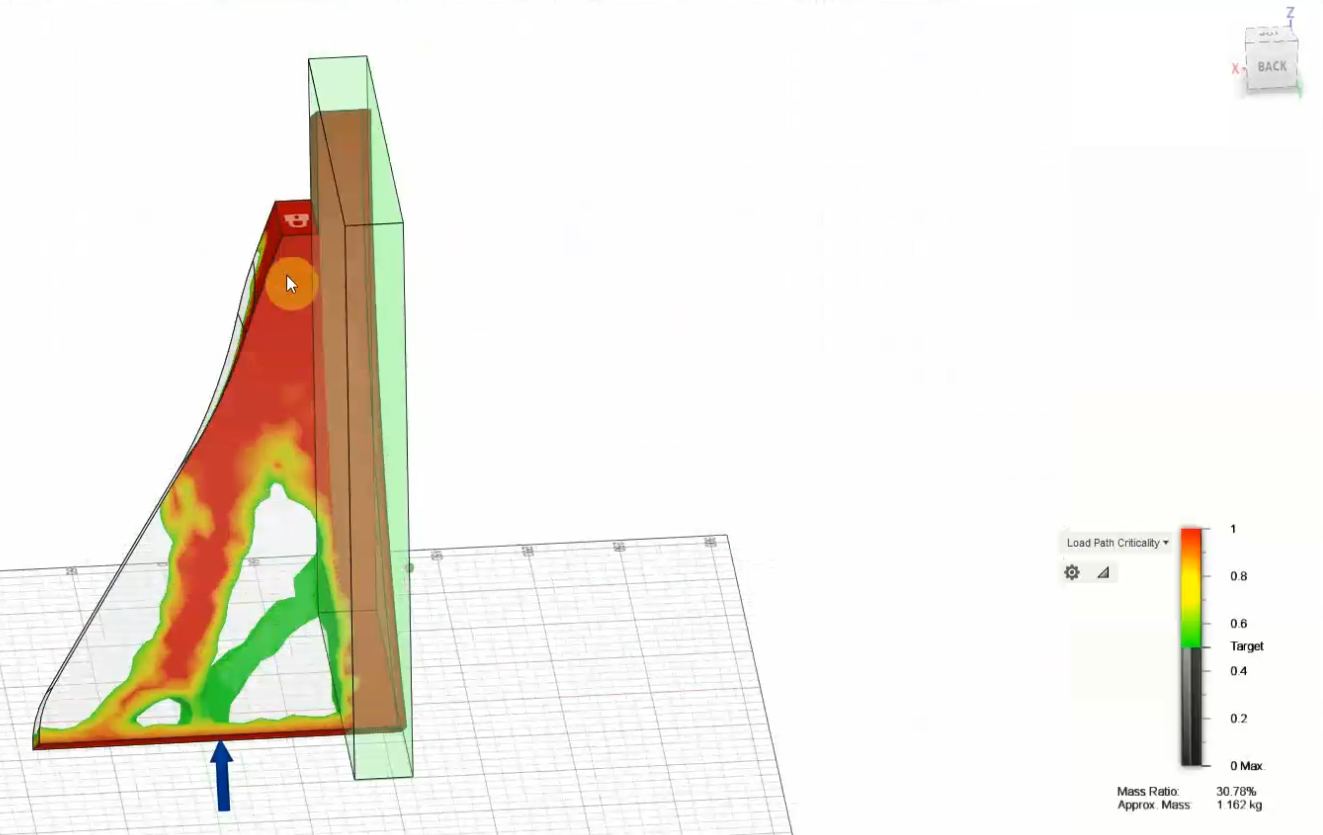
GOING BEYOND “JUST GOOD ENOUGH”
Featured




Team GRATR (left-to-right): Zachary Howell, Adam Hugo, Kyle Barras